aan wrote:hehehe iya om, seinget saya dulu pake gyro PG-03, v-tail punya GWS, motor axi yang kecil, blade dari balsa dilekukin, trus dikerasin pake CA. karena motor punya delay cukup lama saat harus mengkompensasi kemiringan karena kompensasinya vertikal (beda dengan tail heli yang kompensasinya lateral), sedangkan gyro terlalu cepat merespon gerakan akhirnya sering over shoot, (seperti kita ketahui rate gyro merespon gerakan hanya sesaat setelah itu kembali ke nol, jika posisi pesawat belum level karena delay motor dan gyro sudah kembali ke nol, maka leveling tidak akan tercapai) akhirnya respon gyro jadi tidak bener, tapi belajar dari heli draganflyer (yang 4 rotor itu) dia menambahkan accelerometer untuk mengunci respon gyro--> efeknya kira2 akan seperti Gyro HH pada tail heli. menurut hemat saya tanpa accelerometer harusnya bisa asalkan gyro, vtail, dan esc punya resolusi yang cukup tinggi tentunya jempol harus bergoyang dombret lebih banyak hehehehe
iwan21 wrote:aan wrote:usul om... gimana kalo gini, temenku dulu ada yang nyoba bagus tuh
konfigurasi ini udah saya coba om, tapi enggak tau susah juga ya...kadang ada motor yg muter duluan...eh pas satunya muter, si gyro komopensasi malah kayak ayam di potong he heheh

Dear Pak Aan,
Seperti kata Pak Iwan21, emang udah dicoba tapi enggak berjalan dengan lancar, mungkin benar configurasi dari gyro dan mixer. Padahal dua peralatan tersebut dengan product yang sama GWS.
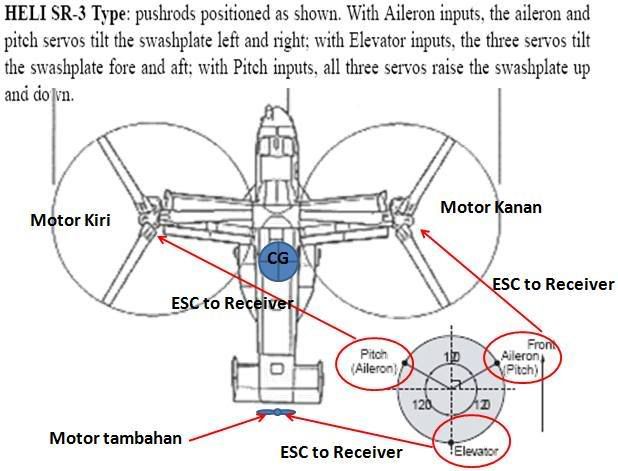
Rencana berikut saya akan menambahkan satu motor dibelakang dengan posisi vertical dengan koneksi ketiga motor tersebut seolah-olah sebagai swash plate dari heli dengan set-up CCPM. Demikian Om Aan mohon masukannya.