Terbang Sore di Joko Dolog
Moderators: Syafik, ferry, medy, thom45
-
Joker

- Senior Airman

- Posts: 100
- Joined: 24 Jul 2007, 11:56
- Location: Surabaya
- Contact:
-
ferry

- Senior Master Sergeant

- Posts: 525
- Joined: 18 Jan 2007, 08:49
- Location: Surabaya
- Contact:
Re: Terbang Sore di Joko Dolog
Coba perhatikan ini sama gak dgn punyaku....murah mariah!! 
-
medy

- Posts: 9
- Joined: 30 Jul 2008, 10:34
- Location: Jakarta
- Contact:
Re: Terbang Sore di Joko Dolog
cucu JD tambah pinter kreatif sekarang  good...good...good
good...good...good
good...good...good-
suprayitno

- Senior Master Sergeant
- Posts: 722
- Joined: 12 Mar 2008, 10:05
- Location: Sidoarjo
Re: Terbang Sore di Joko Dolog
ferry wrote:Coba perhatikan ini sama gak dgn punyaku....murah mariah!!
Kok Pada smilesnya pada ketawa semua jadi bingung nih.
Ketawa juga ah,...

Itu idenya begini. Karena trush vectoring kebanyakan sumbuh untuk membelokkan motor tidak pada center gravity motor itu sendiri, maka saat terjadi benturan, beban motor akan di transmisikan melalui push link yang pada akhirnya di tahan oleh servo. Jika servonya yang murahan pasti akan rompal. Apalagi kalau sumbu tidak center dengan sumbu motor, maka servo akan terbebani saat kita saat throtle kita naikkan. Dengan konstruksi diatas harapanya, thrus dan momen akibat impact Nol. Jadi servo praktis tidak menyangga apa-apa. Kecuali saat servo kita beri input untuk membelokkan motor.
Mungkin lebih jelasnya seperti gambar dibawah ini.
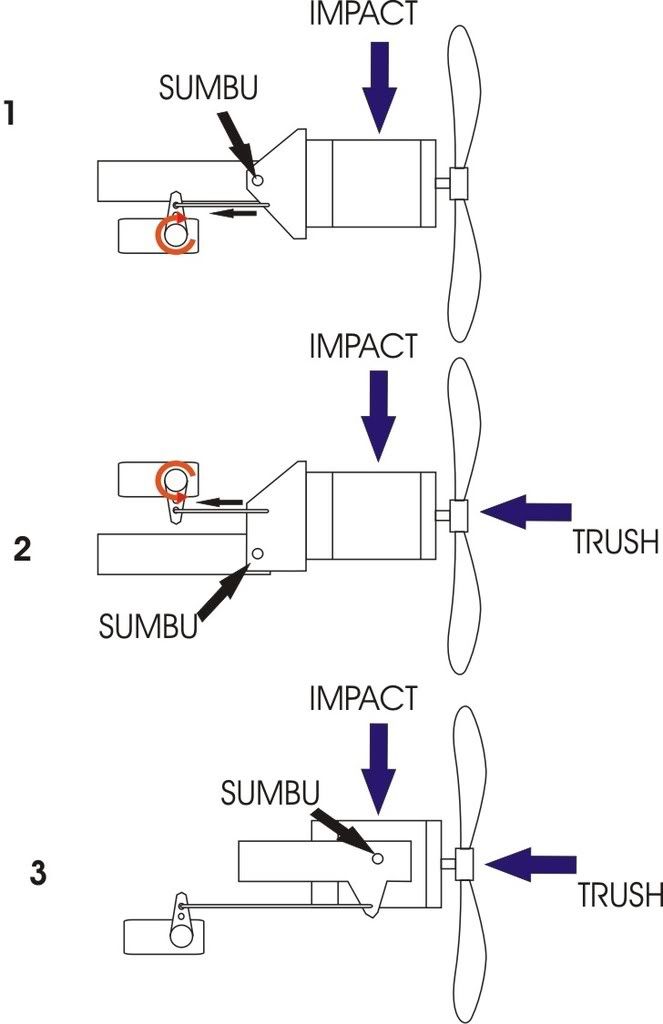
Gambar no 1. Sumbu lurus dengan sumbu motor. Saat ada trush beban tetap pada sumbu. Tapi servo tetap menyangga berat motor.
Gambar no 2. Sumbu tidak center dengan sumbu motor. Disamping menahan trush servo juga menahan motor.
Gambar no 3. Sumbu berada ditengah atau CG motor + Propnya. Maka semua beban akan terpusat pada sumbu tersebut.
Impact terjadi saat hard landing, maupun crash, besarnya impact adalah berat motor dikalikan percepatan, serta jarak sumbu terhadap sumbu arm servo. Betul nggak ya. Kalau keliru mohon koreksi.
-
ferry
- Senior Master Sergeant
- Posts: 525
- Joined: 18 Jan 2007, 08:49
- Location: Surabaya
- Contact:
Re: Terbang Sore di Joko Dolog
Paparan yg menarik nih pake rumusan fisika segala......matur suwun Om jd tambah jelas satu bukti kalo rajin sowan ke mbah JD.....yg punya saya mirip point 2 tanpa pertimbangan rumusan fisikanya cuma cari praktis saja makanya servo yg digunakan dgn torsi yg lumayan besar.....dgn cara om Prayit ini dimungkinkan pake servo dgn torsi lebih ringan krn gaya yg terjadi dititik tersebut paling kecil dan kemungkinan terjadi impact yg berpengaruh terhadap sevo jg kecil begitu ya Om?,....... 
-
Joker
- Senior Airman
- Posts: 100
- Joined: 24 Jul 2007, 11:56
- Location: Surabaya
- Contact:
Re: Terbang Sore di Joko Dolog
betul om ferry , ini om prayit dapet wangsit pas sore kemarin di MBah JD
-
suprayitno
- Senior Master Sergeant
- Posts: 722
- Joined: 12 Mar 2008, 10:05
- Location: Sidoarjo
Re: Terbang Sore di Joko Dolog
Bukti kalau di JD nggak hanya kiss bye saja.
-
sevenslidegrills

- Technical Sergeant

- Posts: 372
- Joined: 03 Jul 2007, 00:33
- Location: SBY-MDR
- Contact:
Re: Terbang Sore di Joko Dolog
Juga membuktikan kalo bakar menyannya lebih banyak!
-
Syafik

- Major General

- Posts: 4021
- Joined: 22 Jan 2007, 13:24
- Location: Gresik - Surabaya
- Contact:
Re: Terbang Sore di Joko Dolog
suprayitno wrote:sevenslidegrills wrote:suprayitno wrote:Ternyata anginnya besar, dan nggak jadi mengudara.
Tapi tetep ngopi kan.....?
Tetap Om, sambil ngobrol ngalor ngidul seputar elektronik, pesawat dll.
Akhirnya dapat ide lagi kayak dibawah ini.
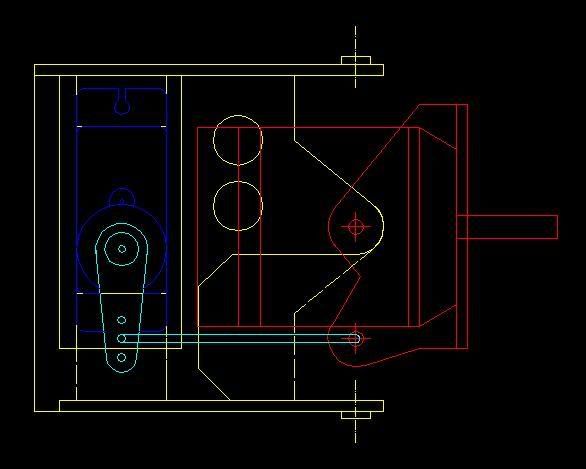
Hasil diskusi dibawah pangkuan mbah JD menghasilkan pemikiran kolaborasi dg mbah fisika Einstein
Kalau lihat gambar diatas bisa jadi itu trust vectoring up down dan left right, mixing rudder dan elevator sekalian tinggal ngasih servo horn posisi sumbu verticalnya... bahannya buat mounting motor vectoringnya dapat om?
Memang akhir2 ini angin blm bisa ditoleransi untuk menyalurkan hasrat bermain aero, sementara coolong down dulu walaupun jempol udah gatal
-
suprayitno
- Senior Master Sergeant
- Posts: 722
- Joined: 12 Mar 2008, 10:05
- Location: Sidoarjo
Re: Terbang Sore di Joko Dolog
@ Om Syafik: Betul om, rencananya bisa di gerakkan ke segala arah (dua sumbu) vertikal dan horisontal. Bisa nggak ya dimixing dengan rudder. Soalnya sumbunya memang beda dengan Vtail.
Bahannya sudah dapat. PCB fiberglas 2 layer. Tinggal nggambar sumbu vertikal dan penempatan servonya yang belum.
Bahannya sudah dapat. PCB fiberglas 2 layer. Tinggal nggambar sumbu vertikal dan penempatan servonya yang belum.